自动驾驶的感知领域中,特斯拉坚定使用纯视觉方案
2020-09-17
在自动驾驶的感知领域,行业内分成了立场鲜明的两派——视觉派和激光雷达派。特斯拉是视觉派最坚定的守护者。埃隆·马斯克清楚地认识到视觉与激光雷达的优劣势,同时不断推动让视觉方案做到本只能由激光雷达做到的事情。

特斯拉如何克服视觉劣势?
从2D平面图像推断精确的3D立体实景,实际上是非常困难的。
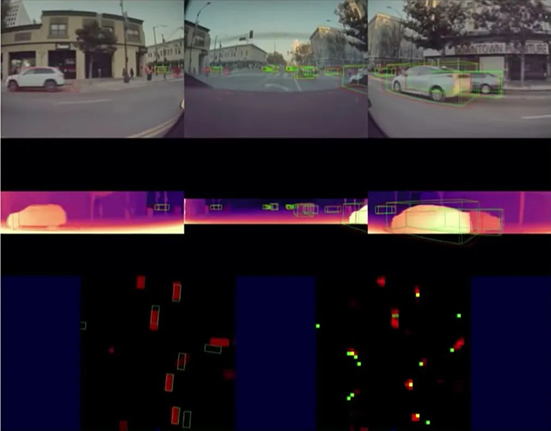
以下图中这辆MPV为例,如果只看左侧的2D图像,似乎用视觉和激光雷达标注的形状都是准确的,但是如果放在3D的场景中,就会发现使用视觉方案标注的形状不仅偏长、偏窄,而且缺少了汽车的侧面。
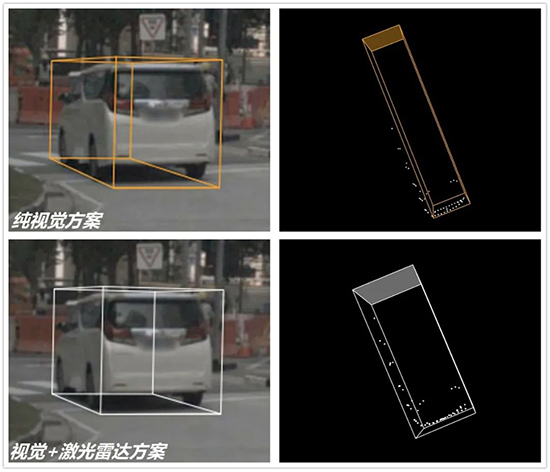
因为在2D图像中,很容易找到车辆的左前角和右后角,但是左后角却没有明显的特征,由于车辆尾部的倾斜、向上收窄,就会造成对整体宽度的低估。同时,依靠发动机舱盖超出车顶的部分估算车长,也会导致在纵深方向上的高估。
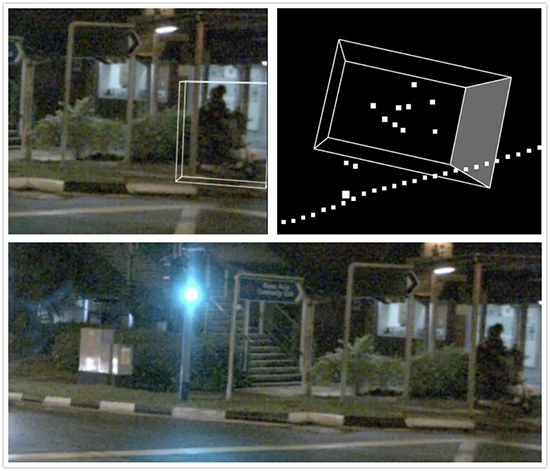
而这还仅仅是一个在高亮度环境下相对规则的物体,如果环境变暗,或是加入更多的遮蔽物、障碍物,情况会变得更加极端。比如在黑暗树荫中的二轮车,纯视觉方案很难分辨。
因此,从根本算法上解决视觉信息的准确处理,就是特斯拉自动驾驶体系的绝对核心技术。
分析2D图像的每个像素,将其还原成真实的3D场景,毫无疑问其中的核心能力,依然是图像处理的算法以及支持这一算法的高算力硬件,也是特斯拉将其视觉方案进一步升级的体现。
如果特斯拉要依靠纯视觉方案解决L4乃至L5级别的完全自动驾驶,通过强大的计算能力解决2D图像到3D实景的转换,是必须要攻克的难关。


